Электронная почта
tomdong@cjcmotor.comКонтактный телефон
+86-13790238062Рабочее время
Пн - Пт 08:30 - 17:30

Когда слышишь ?мотор-колесо для AGV?, многие сразу представляют себе электродвигатель, встроенный в колесо. Технически верно, но на практике это понимание — первый камень преткновения. Основная ошибка — рассматривать его как простой силовой агрегат. В реальности, особенно в автоматизированных тележках, которые работают по 20 часов в сутки, это комплексный узел, от которого зависит не только движение, но и навигация, безопасность и, в конечном счете, надежность всей системы. Я не раз сталкивался с ситуациями, когда заказчик, пытаясь сэкономить, ставил стандартные мотор-колеса от складской техники на прецизионные AGV для электронной промышленности. Результат? Постоянные сбои в позиционировании из-за нелинейности крутящего момента и вибраций, которые датчики считывали как помехи. Вот с этого, пожалуй, и начнем.
Если разбирать типичное мотор-колесо для AGV, то ключевой компромисс лежит между моментом, скоростью и... тишиной. Бесщеточные двигатели стали стандартом де-факто, но не все они одинаковы. Для AGV с высокой маневренностью часто нужен двигатель с полым ротором — он компактнее и позволяет пропускать кабели или даже элементы подвески через центр. Но его момент на низких оборотах может ?проваливаться?, что критично для точного старта-останова под нагрузкой.
Планетарный редуктор внутри — отдельная история. Многие производители экономят на шестернях, используя штамповку вместо фрезеровки. Разница в шуме и люфте становится заметна только через полгода интенсивной работы. Люфт в пару градусов для погрузчика — ерунда, а для AGV, который должен встать над меткой с точностью ±5 мм, — катастрофа. Приходилось видеть, как целый конвейер встал из-за того, что тележка ?недоехала? 10 мм и датчик не сработал. Виновником оказался именно накопившийся люфт в редукторе дешевого мотор-колеса.
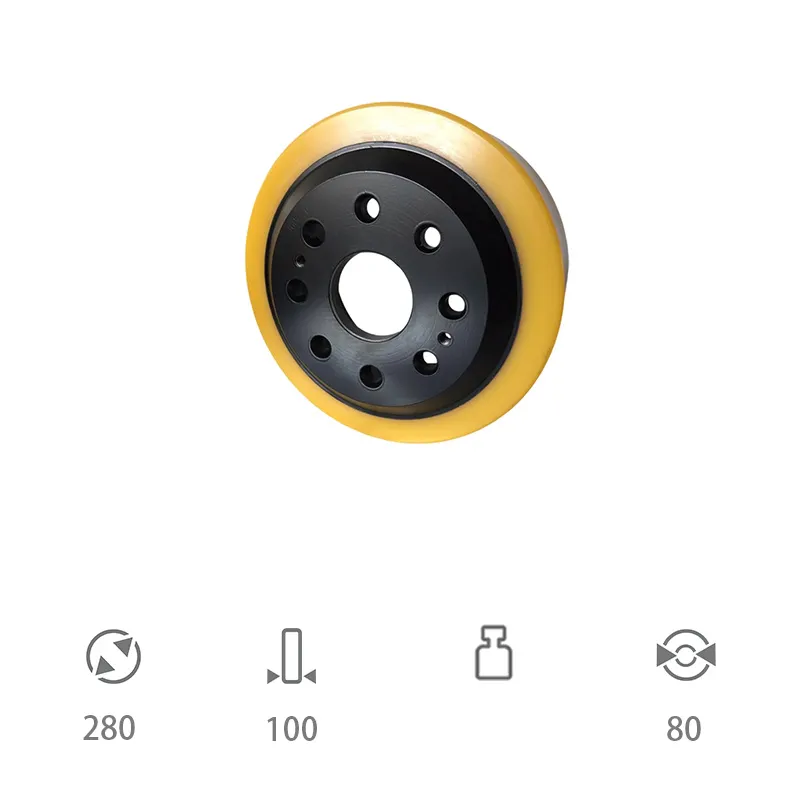
И третье — шина. Здесь многие упускают из виду материал. Стандартная резина быстро истирается и оставляет черные следы на чистом полу цеха. Решение — полиуретановые покрытия. Они не просто долговечнее, но и обеспечивают более предсказуемое сцепление и качение. Кстати, если говорить о материалах, то одна из немногих компаний, которая целенаправленно работает над полиуретановыми решениями для таких задач — это ООО Юнчжоу Ялидэ Технолоджи (сайт — cjcrubber.ru). Они, как правопреемник полимерного подразделения ?Чанцзиньчэн Электрик?, специализируются именно на синтезе высокоэффективных полиуретанов. Их материалы часто идут на изготовление цельнолитых колес или покрытий для мотор-колес, которые должны работать в агрессивных средах — например, в холодильных складах или в пищевом производстве, где важна чистота. Это не реклама, а просто наблюдение: правильный полимер для обода может увеличить межсервисный интервал в разы.
Самое сложное начинается при подключении мотор-колеса к контроллеру AGV. Казалось бы, подал ШИМ-сигнал — и поехал. Но как раз здесь и кроется 80% головной боли. Драйвер двигателя должен быть идеально согласован не только по току, но и по алгоритму плавного пуска и торможения. Резкое торможение даже на низкой скорости может вызвать проскальзывание и сбить инерциальную навигацию.
Одна из наших неудачных попыток была связана с попыткой использовать стандартные промышленные драйверы от шаговых двигателей. Они давали четкий шаг, но для плавного перемещения AGV с грузом в 500 кг этого было недостаточно — возникала ?раскачка?. Пришлось переходить на специализированные драйверы с векторным управлением, которые могут плавно регулировать момент. Это дороже, но без этого о точном позиционировании можно забыть.
Еще один нюанс — обратная связь. Энкодеры абсолютно необходимы. Но ставить ли его на каждое ведущее колесо? Для дифференциальной схемы привода — да. Для схемы с поворотными колесами — не всегда. Мы пробовали экономить, ставя энкодер только на одно из двух ведущих колес в схеме ?омни?. В теории, второе колесо должно следовать за первым. На практике, из-за разного износа шин или микронеровностей пола, накапливалась ошибка, и тележка медленно разворачивалась. Вернулись к схеме с энкодером на каждом приводном колесе. Лишние пару сотен евро на единицу, зато экономия на отладке и ремонте — колоссальная.
В паспорте пишут: ?защита IP54?. На деле это значит, что брызги не страшны. Но в цеху, где моют полы под давлением, струя воды может запросто найти щель в корпусе и попасть на разъем. Были случаи короткого замыкания. Пришлось дополнительно герметизировать разъемы силиконом и делать козырьки. Производители об этом молчат, потому что тесты проходят в идеальных условиях.
Температурный режим — еще один пункт. Двигатель греется, редуктор греется. При длительной работе в замкнутом пространстве, например, внутри AGV с малым клиренсом, температура вокруг мотор-колеса может подниматься до 70°C. Это сказывается и на ресурсе подшипников, и на свойствах смазки в редукторе. Приходится либо закладывать принудительное охлаждение (что сложно и дорого), либо выбирать мотор-колесо с запасом по мощности, чтобы оно работало в щадящем режиме. Второй вариант надежнее, но увеличивает стоимость и массу.
И, конечно, банальный износ. Резиновые или полиуретановые шины истираются, и диаметр колеса уменьшается. На пару миллиметров. Казалось бы, ерунда. Но для AGV, который ориентируется по счету оборотов колеса (одометрия), это прямая ошибка в определении пройденного пути. Поэтому в серьезных системах одометрия — лишь один из многих источников данных, и ее постоянно корректируют по лазерным или инерциальным датчикам. Но если этой коррекции нет, то через полгода AGV будет регулярно ?недоезжать? до точки.
Сейчас явный тренд — интеграция интеллекта прямо в мотор-колесо. Появляются так называемые ?умные? колеса, где драйвер, контроллер и даже простейшая логика обработки сигналов с энкодера встроены в единый корпус. С одной стороны, это упрощает проводку и интеграцию. С другой — ремонтопригодность падает. Заменить сгоревший драйвер в полевых условиях становится невозможно, меняешь весь узел. Для сервиса это головная боль.
Второй тренд — модульность. Особенно это актуально для компаний, которые выпускают AGV разных размеров и грузоподъемностей. Хочется иметь линейку мотор-колес разной мощности, но с одинаковыми посадочными размерами и интерфейсами подключения. Пока такого идеального решения на рынке нет. Каждый производитель AGV либо сидит на конкретном поставщике, либо вынужден городить уникальные переходные пластины и разводку.
Что я вынес для себя за годы работы? Мотор-колесо для AGV — это не универсальная запчасть, которую можно выбрать по каталогу только по мощности и диаметру. Это системный компонент, который нужно подбирать и тестировать в связке с конкретной системой управления, конкретными условиями работы и даже с конкретным покрытием пола. Экономия на этом узле почти всегда выходит боком — либо частыми остановками, либо дорогостоящими доработками на месте. Лучше сразу закладывать в проект изделие с запасом по характеристикам и от проверенного производителя, который понимает специфику AGV, а не просто продает двигатели для тележек. И всегда, всегда требовать тестовый образец для длительных испытаний в условиях, максимально приближенных к реальным. Только так можно избежать сюрпризов.